Inhalt Index DeskTop Bronstein
![]()
![]() Lineare Integralgleichungen Fredholmsche Integralgleichungen 2. Art Numerische Verfahren für Fredholmsche Integralgleichungen 2. Art
Lineare Integralgleichungen Fredholmsche Integralgleichungen 2. Art Numerische Verfahren für Fredholmsche Integralgleichungen 2. Art
![]()
![]()
Es werden n auf dem Intervall [a,b] linear unabhängige Funktionen ![]() vorgegeben. Mit diesen Funktionen bildet man eine Ansatzfunktion
vorgegeben. Mit diesen Funktionen bildet man eine Ansatzfunktion ![]() für die Lösung
für die Lösung ![]() :
:
Die Aufgabe besteht in der Bestimmung der Koeffizienten ![]() . Für eine so definierte Funktion
. Für eine so definierte Funktion ![]() wird es im allgemeinen keine Werte
wird es im allgemeinen keine Werte ![]() geben, so daß damit die exakte Lösung der Integralgleichung (11.23)
geben, so daß damit die exakte Lösung der Integralgleichung (11.23) ![]() vorliegt. Deshalb gibt man sich im Integrationsintervall n Stützstellen
vorliegt. Deshalb gibt man sich im Integrationsintervall n Stützstellen ![]() vor und fordert, daß der Ansatz (11.37a) die Integralgleichung zumindest an diesen Stellen erfüllt:
vor und fordert, daß der Ansatz (11.37a) die Integralgleichung zumindest an diesen Stellen erfüllt:
und die Vektoren
dann kann das Gleichungssystem zur Bestimmung der Zahlen ![]() in Matrizenform angegeben werden:
in Matrizenform angegeben werden:
| Beispiel |
|
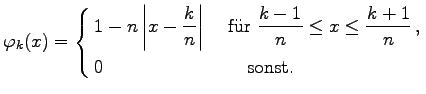
Soll in diesem Beispiel die Genauigkeit verbessert werden, empfiehlt es sich nicht, den Grad des Polynomansatzes zu erhöhen, da Polynome höheren Grades numerisch instabil sind. Es sind vielmehr verschiedene Spline-Funktionenansätze vorzuziehen, etwa der stückweise lineare Ansatz |
Hinweis: Die Wahl der Lage der Stützstellen für das Kollokationsverfahren ist prinzipiell ohne Beschränkung. Ist jedoch bekannt, daß die Lösungsfunktion in einem Teilintervall stark oszilliert, dann sollten in diesem Intervall die Stützstellen dichter gelegt werden.