Inhalt Index DeskTop Bronstein
![]()
![]() Geometrie Vektoralgebra und analytische Geometrie Geometrische Transformationen und Koordinatentransformationen
Geometrie Vektoralgebra und analytische Geometrie Geometrische Transformationen und Koordinatentransformationen
![]()
![]()
Während für die Rotation, die Skalierung und die Verscherung mit den Beziehungen (3.453a), (3.455a) und (3.457a) Abbildungsvorschriften in Matrixschreibweise mit einer 2 x 2-Transformationsmatrix formuliert werden können, weicht die Translation von dieser Darstellung ab. Um alle Grundtransformationen in gleicher Weise behandeln und kombinieren zu können, wird zu einem System homogener Koordinaten übergegangen. Dazu wird jedem Punkt der Ebene eine zusätzliche Koordinate ![]() zugeordnet. Damit geht P(x,y) über in
zugeordnet. Damit geht P(x,y) über in ![]() . Die Koordinaten stehen zueinander in folgender Beziehungen:
. Die Koordinaten stehen zueinander in folgender Beziehungen:
Für die weiteren Darstellungen wird w =1 festgelegt. Der Punkt P(x,y) besitzt damit die homogenen Koordinaten ![]() . Jetzt können alle Grundtransformationen mit einer 3 x 3-Transformationsmatrix in folgender Form beschrieben werden:
. Jetzt können alle Grundtransformationen mit einer 3 x 3-Transformationsmatrix in folgender Form beschrieben werden:
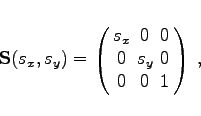
Die Transformationsmatrizen für Translation, Rotation, Skalierung und Verscherung lauten: