Inhalt Index DeskTop Bronstein
![]()
![]() Geometrie Vektoralgebra und analytische Geometrie Geometrische Transformationen und Koordinatentransformationen 3D-Transformationen
Geometrie Vektoralgebra und analytische Geometrie Geometrische Transformationen und Koordinatentransformationen 3D-Transformationen
![]()
![]()
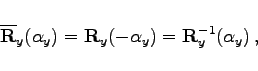
Analog zur zweidimensionalen Situation hat eine Transformation des Koordinatensystems hinsichtlich der Koordinatendarstellung eines Punktes die gleiche Wirkung wie die inverse geometrische Transformation des Punktes (s. Koordinatentransformation). Für die Transformationsmatrizen gilt also:
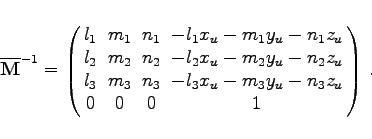
In der Praxis ist häufig der Spezialfall einer Transformation von einem rechtshändigen kartesischen Bezugskoordinatensystem in ein anderes kartesisches Koordinatensystem anzutreffen. Das Bezugssystem wird dabei oft als Weltkoordinatensystem und das andere als lokales Koordinatensystem oder objektbezogenes Koordinatensystem bezeichnet. Wenn der Ursprung des lokalen Systems U(xu,yu,zu) und dessen Koordinateneinheitsvektoren ![]() ,
, ![]() und
und ![]() in Weltkoordinaten angegeben sind, lauten die Transformationsmatrizen zur Abbildung vom Objektsystem in das Weltkoordinatensystem und für die Umkehrtransformation
in Weltkoordinaten angegeben sind, lauten die Transformationsmatrizen zur Abbildung vom Objektsystem in das Weltkoordinatensystem und für die Umkehrtransformation
Für einen Punkt ![]() , der im Objektsystem die Koordinaten
, der im Objektsystem die Koordinaten ![]() und im Weltkoordinatensystem die Koordinaten
und im Weltkoordinatensystem die Koordinaten ![]() hat, gilt:
hat, gilt:
 |
(3.484) |
Sind mit ![]() und
und ![]() die Transformationsmatrizen für die Abbildung zweier lokaler Systeme ins Weltkoordinatensystem gegeben, dann wird die Transformation zwischen beiden lokalen Systemen beschrieben durch die Matrizen
die Transformationsmatrizen für die Abbildung zweier lokaler Systeme ins Weltkoordinatensystem gegeben, dann wird die Transformation zwischen beiden lokalen Systemen beschrieben durch die Matrizen
| Beispiel Ermittlung der Transformationsmatrix |
|
Ermittlung der Transformationsmatrix für eine Rotation um den Winkel Zunächst wird eine Abbildung der Raumachse in die z-Achse des Koordinatensystems vorgenommen. Anschließend erfolgt eine Rotation um den Winkel
Sie setzt sich zusammen aus:
   |
In Abschnitt Quaternionen wird eine alternative Methode zur Beschreibung von Rotationstransformationen unter Ausnutzung der Eigenschaften von Quaternionen angegeben.